


(2 Sechs-Achs-Roboter und ein Positionierer) zur Herstellung von nicht-planaren Spulen (3D-Spulen, gekröpfte Spulen, verteilte Wicklungen, Sattelspulen, Toroiden, etc.)
und/ oder komplexen Architekturen mit Supraleitern (insbesondere Hochtemperatur-Supraleiter-Bändern).
Vorab wird der virtuellen Prozess im Digitalen Zwilling (PC) geprüft.
Die Wickelhand der Roboter erlaubt zum einen eine Übergabe an den anderen Roboter im Wickelbetrieb,
als auch die erforderliche Prozesskontrolle mit Übermittlung der Daten an Steuerung und Protokollierung.

Powerfull heatpipe cooling tail to operate small HTS coils in a cryogen-free environment (test purposes only).
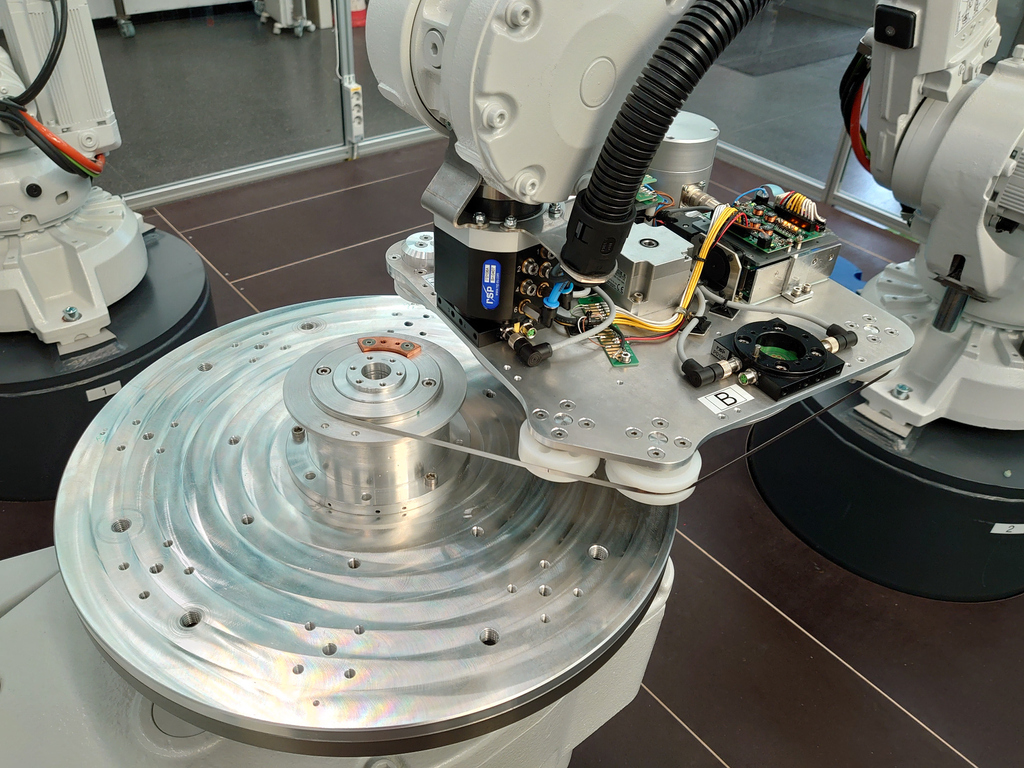
Eng: Robotischer Wickelprozess einer einfachen, kleinen HTS-Pancake-Spule.
Die Wickelhand wird kontrolliert bewegt, nicht der Spulenkörper.

Collection of graded HTS insert coils for 26.5 wide-bore high-field superconducting magnet at ITEP.